







港聞更多
許正宇稱本港未來重點是落實好中證監五大措施
中證監早前公布五項鞏固香港金融市場措施,財經事務及庫務局局長許正宇形容是好消息,可以推動各方面包括現…



中國新聞更多

2024年1—3月份全國規模以上工業企業利潤增長4.3%
新京報訊 據國家統計局網站消息, 1—3月份,全國規模以上工業企業實現利潤總額15055.3億元,同…




焦點娛聞

StrayKidsLEEKNOW&HYUNJINAirportDeparture24.04.27【影片】
【YouTube】Stray Kids LEEKNOW & HYUNJIN Airport …




體育報導

紐奧良精英賽小麥/勞瑞並列領先 袁竇組合淘汰
香港時間4月27日,「明星組合」馬克羅伊和尚恩-勞瑞星期五保持了蘇黎世紐奧良精英賽的領先位置。在美巡…




今日財經

傳承與創新 品質與文化 汾酒複興之路行穩致遠
在數據中,看見清香白酒消費升級之路;在詩詞中,溯源曆朝曆代的品質生活;在非遺里,見證汾酒活態文化生命…



熱門科技

電競新寵!盛色G4讓你的遊戲世界更精彩
在電競世界中,每一幀畫面的流暢與細膩,都直接關係到玩家的競技體驗。對於追求極致視覺享受的電競愛好者…


BEAUTY

保養程序沒問題,肌膚卻很暗沉?韓妞最新保養秘笈水乳濕敷法,肌膚每天都像喝飽水,只上防曬也很亮
最近天氣越來越熱,就知道夏天真的要到了吧!即使擦上防曬,肌膚仍然可能因爲受到陽光曝曬而暗沈乾燥。但別…




生活消閒
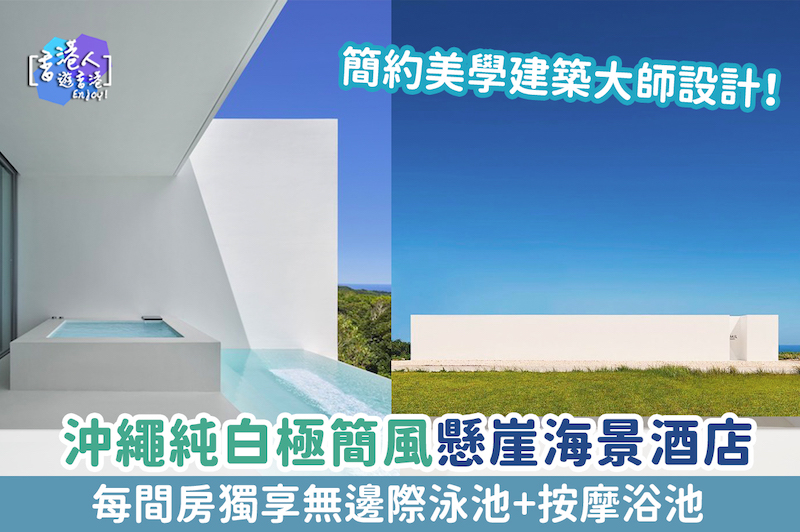
日本酒店:【極簡控注意!沖繩純白極簡風懸崖海景酒店 每間房獨享無邊際泳池+按摩浴池!】- EMIL NAKIJIN
日本酒店推介2024|沖繩純白極簡風懸崖海景酒店 每間房獨享無邊際泳池+按摩浴池EMIL NAKIJ…



