






港聞更多
陳美寶稱新款行人倒數器試點顯示行人橫過馬路情況有輕微改善
運輸署於前年底,在東涌達東路與美東街交界的行人過路處裝設新款行人倒數器作為試點。運輸及物流局局長陳美…

中國新聞更多

湖南桂陽衛健委回應「4歲男童全麻拔乳牙身亡」:已介入調查
來源:大象新聞 7月22日,有網民在社交媒體發佈影片,稱其四歲侄子在桂陽縣第一人民醫院(總院)接受乳…




焦點娛聞

ILLIT公開日本出道單曲專輯《TokiYoTomare》概念照
【mhn】ILLIT公開日本出道單曲專輯《Toki Yo Tomare》概念照,展現清新日常魅力。 …




體育報導

殷若寧領銜!2025別克LPGA錦標賽十月重返上海
2025年10月9日至12日,2025別克LPGA錦標賽將在上海旗忠花園高爾夫球會重磅歸來。作為LP…





今日財經

互聯網券商發力,金融科技ETF(159851)放量衝高2%!大智慧衝擊漲停,指南針盤中股價創新高
23日午後,滬指突破3600點,互聯網券商發力,金融科技衝高逾2%。截至發稿,大智慧一度漲超8%衝擊…



熱門科技
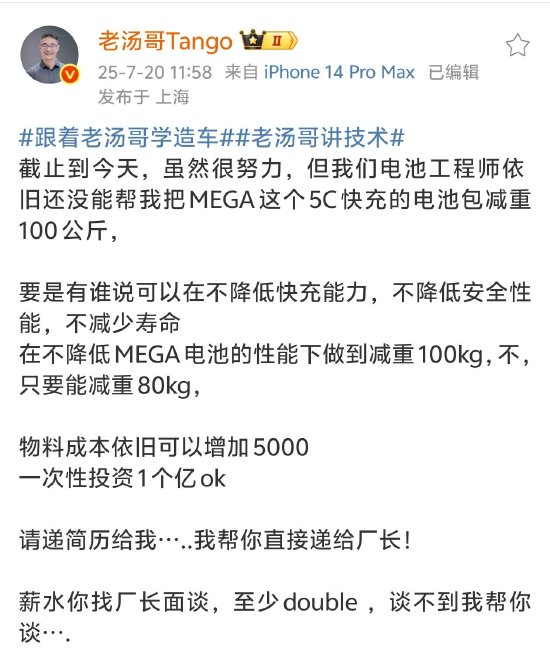
理想高管喊話誰可在不降性能下做到減重薪水至少雙倍,樂道汽車疑似發文回應
新浪科技訊 7月23日下午消息,近日,理想汽車高管疑似與樂道汽車就車輛輕量化問題隔空喊話。 在此前的…



BEAUTY





生活消閒

崇州永利紅瓦廣場宴會酒店,隱匿林間的建築美學
一座隱身於四川崇州市森林深處的建築聚落,由吾和建築設計事務所(We&Arch)精心打造。 &…



